Related Topics:
-

Optical Module ROS
In the context of Robot Operating Systems (ROS), often referred to as “RobotOps” for its operational framework, camera modules serve as the “eyes” of robots, facilitating tasks like navigation, object detection, and human-robot interaction. There are several robotics sensors that are supported by official ROS packages and many more supported by the ROS community. Portal pages help you install and use ROS software with specific types of. This document explains how the O3R camera transform mechanism works, the calibration process, and how transforms are published in ROS 2. The O3R camera system uses a multi-level transform hierarchy to accurately position sensor data in 3D space. Understanding this hierarchy is crucial for proper. Getting robots to see and understand the world like we do is one of the biggest areas of research in robotics, and today we're going to look at the first half of that pipeline - getting data from a camera into our robot. This tutorial provides an in-depth exploration of camera. An optical flow sensor acts like the sensor in a digital mouse, by measuring the movement of objects using the motion of pixels in a sequence of images. It needs to understand where objects are in its physical space. This seemingly simple act of perception. -

-
-
-
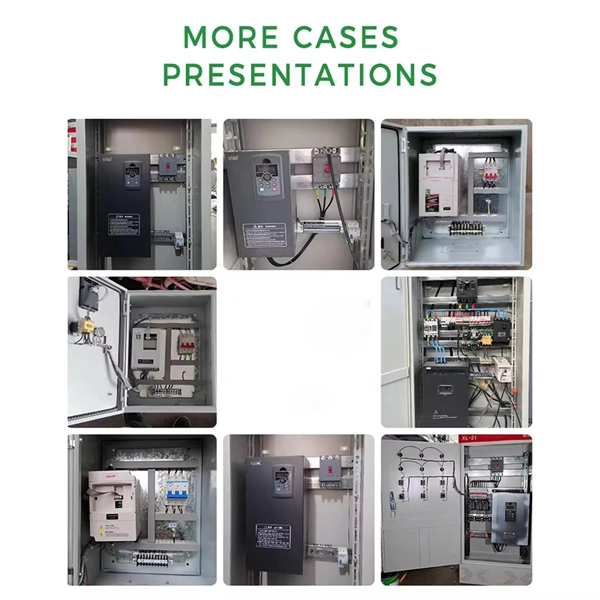
Can distribution boxes be connected to multiple lines
Radial operation is the most widespread and most economic design of both MV and LV networks. It provides a sufficiently high degree of reliability and service continuity for most customers. In American (120. -

-

-

-

-
-

-

Technical Requirements for Busbar Switchgear
For busbar sizing, the primary references are IEC 61439 (for low-voltage switchgear and controlgear assemblies) and IEC 60287 (for current-carrying capacity of cables). IEC 61439 is a standard developed by the International Electrotechnical Commission (IEC) that covers design verification for low-voltage electrical products and assemblies. These busbars are not merely simple current conductors; they serve as the strategic backbone, interconnecting various components within the. A manufacturer of electrical automation panels is not required to use a certified busbar system or to subject it to short-circuit tests, provided that it complies with Table G3. In practice, good design is not only about ampacity. This guide is written for engineers, EPC teams, and procurement managers who need clear equipment decisions, RFQ details, and commissioning checks. switchgear busbar sizing decisions. -

-

-
